Разбираемся как работает кан-шина на примере учебной системы canbasic
Содержание:
Виды CAN-шин
Условно CAN-шины можно разделить между собой на два типа в соответствии с использующимися идентификаторами:
- КАН2, 0А. Так маркируются цифровые устройства, которые могут функционировать в 11-битном формате обмена данными. Этот тип интерфейсов по определению не может выявить ошибки на сигналы от модулей, работающих с 29 бит.
- КАН2, 0В. Так маркируются цифровые интерфейсы, функционирующие в 11-битном формате. Но ключевая особенность состоит в том, что данные об ошибках будут передаваться на микропроцессорные устройства, если обнаруживается идентификатор на 29 бит.
CAN-шины могут делиться на три категории в соответствии с видом:
- Для силового агрегата автомобиля. Если подключить к нему такой тип интерфейса, это позволит обеспечить быструю связь между управляющими системами по дополнительному каналу. Предназначение шины заключается в синхронизации работы ЭБУ двигателя с другими узлами. Например, коробкой передач, антиблокировочной системой и т. д.
- Устройства типа Комфорт. Такая разновидность цифровых интерфейсов используется для соединения всех систем данной категории. К примеру, электронной регулировки зеркал, подогрева сидений и т. д.
- Информационно-командные интерфейсы. Имеют аналогичную скорость передачи информации. Используются для обеспечения качественной связи между узлами, необходимыми для обслуживания транспортного средства. К примеру, между электронным блоком управления и навигационной системой или смартфоном.
О принципе действия, а также о разновидностях цифровых интерфейсов рассказал канал «Электротехника и электроника для программистов».
Что такое CAN шина в машине
Тем автомобилистам, которые хотят узнать, что это такое, не стоит обращаться к каталогам зимней или летней резины. Рекомендуем углубить свои знания в электронике.
CAN шина автомобиля – это часть электронной системы автомобиля, предназначенная для быстрого мониторинга технического состояния транспортного средства в целом и отдельных его элементов и систем.
В машину CAN-шина монтируется для объединения датчиков и процессоров в единую информационную сеть, помогающую синхронизации команд и обработке информации. Благодаря ей происходит сбор данных и мгновенный обмен ими. За счет параллельного подключения обеспечивается возможность корректировки отправляемых сигналов для систем или узлов через датчики на лету.
CAN является аббревиатурой и расшифровывается как Controller Area Network, что может переводиться как «сеть из контроллеров». Фактически шина занимается приемом информации от расположенных вокруг устройств и отправкой данных на такие устройства. Разработка и первые внедрения стандарта проводились еще более трех десятилетий назад.
1 О принципе работы сетевого интерфейса CAN-шина
Кан-шина в автомобиле предназначена для обеспечения подключения любых электронных устройств, которые способны передавать и получать определенную информацию. Таким образом, данные о техническом состоянии систем и управляющие сигналы проходят по витой паре в цифровом формате. Такая схема позволила снизить негативное влияние внешних электромагнитных полей и существенно увеличить скорость передачи данных по протоколу (правила, по которым блоки управления различными системами способны обмениваться информацией).
Кроме того, диагностика ЭБУ различных систем автомобиля своими руками стала проще. За счет применения подобной системы в составе бортовой сети автомобиля высвободилось определенное количество проводников, которые способны обеспечивать связь по различным протоколам, например, между блоком управления двигателем и диагностическим оборудованием, системой сигнализации. Именно наличие Кан-шины в автомобиле позволяет владельцу своими руками выявлять неисправности контроллеров и ошибки с помощью специального диагностического оборудования.
Кан-шина в автомобиле
CAN-шина – это специальная сеть, с помощью которой осуществляется передача и обмен данными между различными узлами управления. Каждый из узлов состоит из микропроцессора (CPU) и CAN-контроллера, с помощью которого реализуется исполняемый протокол и обеспечивается взаимодействие с сетью автомобиля. Шина Кан имеет минимум две пары проводов – CAN_L и CAN_H, по которым и передаются сигналы посредством трансиверов – приемо-передатчиков, способных усиливать сигнал от управляющих устройств сети. Кроме того, трансиверы выполняют и такие функции как:
- регулировка скорости передачи данных посредством усиления или уменьшения подачи тока;
- ограничение тока для предотвращения повреждения датчика или замыкания линий передачи;
- тепловая защита.
На сегодняшний день признаны два вида трансиверов – High Speed и Fault Tolerant. Первый тип наиболее распространен и соответствует стандарту (ISO 11898-2), он позволяет передавать данные со скоростью до 1МБ в секунду. Второй тип приемопередатчиков позволяет создать энергосберегающую сеть, со скоростью передачи до 120 Кб/сек, при этом подобные передатчики не имеют чувствительности к каким-либо повреждениям на самой шине.
Установка сигнализации на Honda Civic с 2006 года
Точки подключения на Хонда Цивик восьмого поколения с 2006 года с мотором 1.8 литра
Подключение к CAN шине Цивик
Наиболее простой доступ к CAN-шине, в разъеме иммобилайзера
Зеленый провод разъема подключить к розовому проводу шины CAN
Подключение датчика наличия ключа в замке зажигания
Для выведения шины CAN из режима сна необходимо подключить доп. Канал № 7 белый провод к розовому проводу датчика наличия ключа в замка
Подключение Аварийки на Цивик 8
Для реализации управления световой сигнализацией необходимо подключить красный/белый провод подключить к питанию +12В. Фиолетовые провода подключить к синему и коричневому проводам в синем и белом разъемах соответственно блока предохранителей в салоне Хонда Цивик
Подключение Центрального замка на Хонда Цивик
Для реализации управления центральным замком Хонда Цивик необходимо использовать управление встроенными реле. Для этого необходимо подключить жёлтый/белый провод и зелёный/белый провод к массе автомобиля, а жёлтый провод к серому проводу в жгуте водительской двери и зелёный провод к синему проводу в нижнем разъеме жгута водительской двери
Подключение Автозапуска на Цивик 8
Подключение цепей автоматического запуска можно выполнить в жгуте замка зажигания. «Зажигание» зелёный провод подключить к желтому проводу разъема замка зажигания, в эту же точку подключить зеленый провод (Датчик включения зажигания). ACC (белый провод ) подключить к оранжевому проводу – зажигание 2. Стартер (жёлтый провод ) подключить к зеленому проводу в разъеме кнопки «СТАРТ». Если вместо кнопки «Старт» установлен стандартный замок зажигания то желтый провод «Стартер», подключить к проводу на замке зажигания на котором появляется плюс на время работы стартера
Подключение имитации нажатия педали тормоза
Для выполнения автоматического запуска необходимо на время выполнения процедуры запуска нажимать педаль тормоза. Для выполнения этого условия нужно подключить серый провод подключить на +12В. Серый/белый провод подключить к бирюзовому проводу датчика нажатия педали тормоза
Отключение штатной сигнализации
Для предотвращения постановки в охрану штатной системы необходимо замкнуть штатный концевик капота на массу
Для использования штатного концевика капота необходимо зеленый провод датчика подключить к коричнево/черному проводу. Зеленый провод приходящий к датчику отрезать и соединить с черным проводом массы в том же жгуте. В случае отсутствия штатной охранной системы необходимо провести под капот коричневы/черный провод и установить концевик капота в подходящем месте.
Цепь блокировки
Для блокировки работы двигателя можно использовать разрыв цепи электробензонасоса – зеленый провод в жгуте левого порога. Для этого необходимо встроенное реле блокировки
Вариант сопряжения с любой сигналкой
Ясно, что большинство проводов модуля подключают к автосигнализации, точнее, к ее сигнальным выходам и входам. Выше рассматривалось, как задействовать выходы ЦЗ либо блокировки. То есть, будем считать, что шесть клемм модуля уже задействованы. Речь идет о следующих клеммах: питание, масса, соединение с шиной (провода 2 и 11), а также 17-й и 18-й контакты разъема. О подключении других контактов рассказывается дальше.
Рекомендуем: Пропуски зажигания – разбираемся, почему троит двигатель?
Назначение входов модуля
Ниже приведена базовая схема подключения. Здесь указано назначение клемм, заданное «по умолчанию»:
CAN F5, схема монтажа
Справа перечислены выходы модуля, а слева – его входы. Концевик тормоза к входу 7 чаще всего не подключают – сигнал о нажатии педали присутствует на шине.
Рассмотрим функции всех входов:
- Шнур 9 – сервисная кнопка (когда зажигание включено), кнопка временного отключения опции «комфорт» (при выключенном зажигании);
- Если включено двухшаговое отпирание (опция 15), то с автосигнализации на вход 17 подается «второй отпирающий сигнал»;
- Провод 16 подключают к одному выходу – на нем появляется напряжение, когда задействуется световая сигнализация;
- Назначение остальных проводов (7, 8 и 18) можно понять из схемы.
Вообще же на схеме, если говорить о входах 17 и 18, указан один вариант подключения: сигнализация управляет состоянием модуля при помощи импульсов. Дело в том, что именно такой метод управления используется по умолчанию. Но поменяв значение настраиваемой опции 14, можно переключиться к другому варианту («статусное» управление). Именно о нем речь шла в пункте 2 – не путайте два разных метода!
Выходы модуля и схемы соединений
Теперь будем говорить о подключении выходов модуля. Чаще их соединяют с входами сигнализации напрямую. Но иногда нужна дополнительная коммутация, что реализуют при помощи реле:
CAN F5 и Chevrolet Captiva
Такое подключение, как показано здесь, позволит имитировать одно событие: дверь водителя всегда открывается после завершения автозапуска.
Известно, что конструкторы любой автосигнализации предусматривают два варианта монтажа: первый предназначен для машин с АКП, второй – для авто с «механикой». В первом случае сигналка контролирует педаль тормоза, во втором – ручной тормоз. Выполняя монтаж, подключайте только желто-белый, либо, наоборот, оранжево-черный шнур модуля. На большее не рассчитана сама сигнализация. Нужны подробности – откройте штатное руководство.
Настройка CAN-модуля
Рассмотрим процесс программирования модуля CAN-шины на примере популярной StarLine A93. Сам модуль устанавливается непосредственно на плату центрального блока, где предусмотрены специальные гнезда. На плате модуля есть USB-разъем, который в дальнейшем позволит обновлять прошивку.
Чтобы войти в режим программирования модуля, временно отключите от сигнализации разъемы питания и CAN-шины. Зажав кнопку Valet, возвращаем на место разъем питания и продолжаем удерживать кнопку, пока не отзвучат пять сигналов сирены.
Система подаст еще 4 сигнала, когда кнопка будет отпущена. Теперь перейдите в соответствующее меню настроек CAN-модуля однократным нажатием кнопки Valet. Затем вводим четырехзначный номер прошивки, быстро нажимая кнопку число раз, соответствующее очередной цифре номера. Например, для кода 1312 нужно нажать кнопку 1 раз, дождаться одиночного сигнала сирены, нажать ее три раза, после трехкратного сигнала нажать дважды, прослушать двойной «кряк» сирены, нажать кнопку еще два раза. После двойного сигнала с небольшой паузой система подаст еще два оповещения, если номер введен правильно, или четыре, если такой номер прошивки не найден.
Далее настраиваются функции модуля, для чего предусмотрено несколько уровней меню:
- Статусные функции: двукратное нажатие Valet
- Управляющие функции: трехкратное нажатие
- Дополнительные функции: четыре нажатия
Можно полностью сбросить CAN-модуль на заводские настройки пятикратным нажатием Valet – если Вы запутались в настройке, и проще начать ее «с нуля»
Меню статусных функций позволяет задать, какие именно информационные сигналы будут считываться с CAN-шины. Например, если Вы подсоединили аналоговый контроль концевиков дверей, считывание информации концевиков с CAN-шины отключите, иначе аналоговый вход не будет работать. Аналогично в меню управляющих функций можно определить, будет ли CAN-модуль управлять «аварийкой», закрытием и открытием центрального замка (причем закрытие и открытие настраиваются отдельно), замком багажника, автозапуском и так далее. В меню дополнительных функций настраивается функция Slave.
Как определить, какие функции нужно реализовать по аналогу, а какие доступны через CAN-шину? Достаточно выбрать на портале can.starline.ru модель автомобиля и тип модуля (2CAN, CAN+LIN и так далее), чтобы узнать номер прошивки, скачать последнюю версию и увидеть перечень функций, доступных в этой прошивке через CAN.
На Chevrolet Cruze до 2015 года с замком зажигания актуальная на момент написания статьи прошивка 1765 потребует включение управление аварийной сигнализацией «по аналогу», а вот управление штатным центральным замком уже можно смело настраивать по CAN-шине, не подключая дополнительные провода. Блокировку запуска придется подключать внешнюю, потому что заглушить мотор через диагностическую шину в этой прошивке тоже нельзя.
Ещё кое-что полезное для Вас:
- Старлайн Е91 — инструкция по эксплуатации и общий обзор
- Автосигнализация Старлай А-94
- Характеристики и обзор Старлайн А-63
В дальнейшем, когда прошивка обновится, появятся дополнительные функции, можно будет просто активировать их в настройках CAN-модуля, не отключая ранее выведенные в штатную проводку аналоговые каналы.
Обзор возможностей протокола CAN
- Продукты — микросхема, инструменты разработки, модули, инструменты проектирования;
- Распределение посланий — каждый участник будет иметь возможность выбирать к просмотру сообщения, касающиеся только его. Для этого предусмотрены фильтры;
- Широковещательный характер – если участник не выбрал только свои сообщения, то он имеет возможность просмотра всего потока информации;
- Контентная адресация – нет явного адресата. Выбираются адреса контента по идентификатору в самом сообщении;
- Виды сообщений – кадр данных, удаленный, ошибки, перезагрузки;
- Стандартный CAN и его расширенная версия – отличаются длиной установленного идентификатора. Если в станд. варианте он равен 11битам, то в его «толстом» собрате – 29 бит;
- Конфликтное разрешение и определение приоритета – чтобы избежать одновременной передачи данных несколькими участниками, выработан арбитражный механизм. Все пакеты поделены на доминантный и рецессивный. Не вдаваясь в подробности, отметим только, что всегда приоритет на стороне доминантного сообщения.
- Физические уровни:
— сигнальная сбалансированная двухпроводная схема high–speed CAN представляет вторую часть стандарта ISO 11898;
— третья часть ISO 11898 составляет следующий уровень вышеназванной схемы;
— однопроводной уровень, описываемый стандартом SAE J2411. Шины этого уровня установлены, например, на автомобилях линейки Дженерал Моторс.
- Прерывание конца – CAN-шина должна содержать на конце резисторное сопротивление (120ОМ), для гашения отражения сигнала, создания уровня постоянного тока.
- Кабель – сопротивление должно укладываться в интервал 108 – 132ОМ.
- Разъем – нет стандартов для разъемов CAN. Каждый протокол описывает свои предпочтения. Однако есть фактический стандарт для автопромышленности.
- Ошибка – контролер найдет ее и отметит флажком, разрушая передачу. Эти флажки станут знаком для всех участников цепи на ее сброс.
- Сбои в передачи – при различных сбоях дается возможность дальнейшего функционирования. Сбои могут быть разного характера: прерывание, короткое замыкание в разных частях, разъединение с оконечным сопротивлением.
Достоинства и недостатки протокола CAN
Протокол CAN вошел в состав стандартного протокола OBD-II.
К несомненным преимуществам CAN относятся:
- Передача информации в реальном времени;
- Простота и дешевизна использования;
- Помехоустойчивость;
- Обеспечение доступа, путем арбитража, без снижения пропускных характеристик сети;
- Контроль всех ошибок обмена данных;
- Большой интервал рабочих скоростей;
- Широкое его применение, большое разнообразие ассортимента от разных поставщиков.
К недостаткам относятся:
- Маленький объем одного пакета данных, который составляет не более 8 байт;
- Служебные данные занимают больше объема, чем передаваемые, что значительно влияет на скорость (разработчикам есть куда расширяться);
- Нет общего стандарта на протоколы повышенного уровня. В CAN можно прописать любой протокол, если его исполнение помещается в рамках пропускной способности CAN.
Применяется этот протокол не только в автомобильной промышленности. В некоторых отраслях промышленности, дорожного строительства, при строительстве высокотехнологичных объектов (так называемые, умные дома), в велосипедном производстве.
Защита от угона
Модуль iCAN устанавливается в каком угодно узле, где расположены жгуты, в месте установки шины. Из-за минимальных габаритов и особого алгоритма действий выявить блокировку обычными методами при совершении угона практически нереально.
Внешне этот модуль маскируется под разные контролирующие датчики, что также делает невозможным его обнаружение. При желании возможно настроить работу прибора для автоматической защиты им стекол автомобиля, зеркал.
При наличии у транспортного средства автозапуска двигателя, iCAN не помешает его работе, так как срабатывает при старте движения.
Ознакомившись с устройством и принципами обмена данными, которой наделена CAN-шина, становится понятным, почему все современные автомобили применяют эти технологии при разработке управления транспортным средством.
Представленная технология по своему устройству довольно сложна. Однако все заложенные в нее функции обеспечат максимально эффенктивное, безопасное и комфортное управление автомобилем.
Существующие разработки помогут обеспечить защиту транспортного средства даже от угона. Благодаря этому, а также комплексу других фунций, шина-CAN популярна и востребована.
Можно ли сделать анализатор своими руками?
Для выполнения этой задачи автовладелец должен иметь профессиональные навыки в области электроники:
- Сборка устройства производится по схеме, представленной на первом фото в галерее. Предварительно нужно купить все детали, необходимые для изготовления. Основным компонентов является плата STM32F103С8Т6, оснащенная контроллером. Также потребуется электрическая схема стабилизатора и CAN-трнасивер. Можно использовать устройство МСР2551 или другой аналог.
- Если требуется сделать анализатор более технологичным, в него можно добавить модуль Bluetooth. Благодаря этому автовладелец может сохранять важную информацию в память смартфона.
- Для программирования анализатора используется любое подходящее для этого программное обеспечение. Согласно отзывам, оптимальный вариант — утилиты Arduino или CANHacker. Во второй утилите есть больше опций и имеется функция фильтрации информации.
- Чтобы произвести прошивку, понадобится преобразователь USB-TTL. Это устройство требуется для отладки, при его отсутствии можно использовать ST-Link.
- После загрузки утилиты на компьютер основной файл с расширением ЕХЕ прошивается в блок с применением программатора. Если процедура выполнена успешно, то надо дополнительно установить перемычку на Bootloader. Собранное устройство надо синхронизировать с компьютером, используя USB-провод.
- Следующим этапом будет добавление прошивки в анализатор. Для выполнения задачи потребуется утилита MPHIDFlash.
- После успешного обновления программы кабель от компьютера отключается и снимается перемычка. Выполняется установка драйверов. Если сборка выполнена корректно, то при подключении к ПК анализатор будет определяться в качестве СОМ-порта.
Фотогалерея
Фото схем для самостоятельного изготовления анализатора приведены в этом разделе.

Общая схема для сборки анализаторного устройства

Плата, использующаяся в качестве основы
Определение КАН-шины
Несмотря на свой богатый функционал, визуально КАН-шина выглядит достаточно примитивно. Все ее составляющие – это чип и два провода. Хотя в самом начале своей «карьеры» (80-е года), для контакта со всеми датчиками, необходимо было более десятка штекеров. Происходило так, потому что каждый отдельный провод отвечал за один единственный сигнал, сейчас же их количество может достигать сотни. Кстати, раз мы уже упомянули датчики, рассмотрим, что именно контролирует наш механизм:
- КПП;
- Двигатель;
- Система антиблокировки;
- Подушка безопасности;
- Дворники;
- Панель приборов;
- Гидроусилитель руля;
- Котроллеры;
- Зажигание;
- Бортовой компьютер;
- Мультимедийная система;
- GPS навигация.
Кроме того, современная КАН-шина может не только проверять оборудование машины, но и даже устранять некоторые сбои! А отличная изоляция всех контактов инструмента, позволяет ему полностью оградить себя от любого рода помех!
Принцип работы
В CAN сети все ЭБУ подключены к шине параллельно. Обмен данными производится короткими пакетами — сообщениями.
CAN сообщение
Каждое сообщение содержит идентификатор, который в сети является уникальным (например, «Температура двигателя 100 град» или «Скорость автомобиля 50 км/ч»). При передаче, все ЭБУ в сети получают сообщение и каждый из них проверяет идентификатор. Если сообщение имеет отношение к данному ЭБУ, то оно обрабатывается, в противном случае – игнорируется. Идентификатор может быть длиной 11 бит или 29 бит.
Арбитраж
В шине CAN биты 0 и 1 имеют ещё одно название: рецессивный уровень и доминантный уровень, соответственно. Если двумя разными передатчиками будет одновремнно передан рецессивный и доминантный уровни, то доминантный уровень подавит рецессивный. Этим механизмом подавления обеспечивается арбитраж на шине. Каждый передатчик одновремнено считывает то, что он предаёт в шину. Передатчик с более низким приоритетом вынужден отпустить шину, так как чужой доминантный уровень с более высоким приоритетом исказил его предачу. В то же время, пакет с более высоким уровнем остался неизменным. Передатчик, потерявший арбитраж, может повторить попытку через некоторе время.
Физический уровень
В автомобиле может применяться несколько типов шин CAN.
Высокоскоростной CAN (High speed) применяется в основном в сети управления двигателем и управления шасси. Там, где необходима высокая скорость реакции. Скорость обмена по этой шине 500 или 250 кбит/сек.
Схема подключения ЭБУ к высокоскоростной шине CAN
Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Схема подключения ЭБУ к низкоскоростной шине CAN
Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины. Работает на скорости 33,3 кбит/сек.
Схема подключения ЭБУ к однопроводной шине CAN
Надёжность
Двухпроводная шина сохраняет свою работоспособность при обрыве или замыкании одного из проводов (для двухпроводной шины).
Фазы работы
Шина CAN используется в автомобилях достаточно давно. Изначально шина CAN использовалась в простых конфигурациях. Например, для надёжной и быстрой связи между ЭБУ мотора и ЭБУ автоматической коробки передач. В этой конфигурации шина использовалась только для передачи данных. В ЭБУ заводилась линия питания и линия от замка зажигания, диагностика производилась по отдельным К-линиям, идущим из каждого ЭБУ.
В более современных автомобилях, по шине CAN передаётся не только управляющая, но и диагностическая информация. Помимо этого, шина CAN стала управлять системой питания ЭБУ. В этой конфигурации все ЭБУ подключены к общему питанию и шине CAN. Замок зажигания является электронным блоком управления и информация о включении зажигания передаётся от него по CAN шине.
Можно выделить четыре основные фазы работы шины:
- Спящий режим В этом режиме все ЭБУ, кроме ЭБУ замка, находятся в выключенном состоянии. На драйвер CAN подается питание. Драйвер так же находится в спящем состоянии. При этом, его энергопотребление составляет около 0,3 мА.
- ПробуждениеКогда вставляется ключ зажигания или открывается дверь, замок выдаёт доминантное состояние в шину CAN. Это приводит к пробуждению CAN драйверов в спящих ЭБУ. Драйверы при обнаружении активности на шине включают стабилизаторы питания в своих ЭБУ.
- Активный режимВ активном режиме ЭБУ постоянно обмениваются информацией. Энергопотребление каждого предатчика при доминантных уровнях может достигать 80 мА.
- ЗасыпаниеВ момент выключения зажигания, по шине CAN выдаётся команда на выключение, после чего каждый ЭБУ сам себя обесточивает и преходит в спящий режим.
Примечание:Для однопроводной шины CAN сигнал пробуждения имеет уровень 12 В, обычный обмен 0-4 В.
Инструкция по подключению сигнализации по CAN-шине
При монтаже противоугонной системы простой вариант ее соединения с бортовой сетью — связать охранную установку с цифровым интерфейсом. Но такой метод возможен при наличии КАН-шины в автомобиле.
Чтобы произвести установку автосигнализации и подключить ее к CAN-интерфейсу, необходимо знать место монтажа блока управления системой.
Если сигналку ставили специалисты, то надо обратиться за помощью с этим вопросом на СТО. Обычно устройство располагается за приборной панелью автомобиля или под ней. Иногда установщики ставят микропроцессорный модуль в свободное пространство за бардачком или автомагнитолой.
Для выполнения задачи потребуется:
- мультиметр;
- канцелярский нож;
- изолента;
- отвертка.
Пошаговые действия
Процедура подключения противоугонной установки к CAN-шине осуществляется так:
- Сначала надо убедиться, что все элементы охранного комплекса установлены и работают. Речь идет о микропроцессорном блоке, антенном модуле, сервисной кнопке, сирене, а также концевых переключателях. Если сигнализация имеет опцию автозапуска, надо убедиться в правильности монтажа этого устройства. Все элементы противоугонной установки подключаются к микропроцессорному блоку.
- Выполняется поиск основного проводника, идущего к CAN-шине. Он более толстый и его изоляция обычно окрашена в оранжевый цвет.
- Основной блок автосигнализации соединяется с данным контактом. Для выполнения задачи используется разъем цифрового интерфейса.
- Производится монтаж блока управления охранной системы, если он не был установлен. Его следует разместить в сухом и недоступном для посторонних глаз месте. После монтажа устройство надо качественно зафиксировать, иначе в процессе движения на него будут оказывать негативное воздействие вибрации. В результате это приведет к быстрой поломке модуля.
- Место соединения проводников тщательно изолируется, допускается использование термоусадочных трубок. Рекомендуется дополнительно обмотать изолентой провода. Это позволит увеличить их ресурс эксплуатации и не допустить стирания изоляционного слоя. Когда подключение будет выполнено, осуществляется проверка. Если возникли проблемы в передачи пакетных данных, с помощью мультиметра следует произвести диагностику целостности электроцепей.
- На завершающем этапе выполняется настройка всех каналов связи, в том числе дополнительных, если они имеются. Это позволит обеспечить бесперебойную работу охранной системы. Для настройки используется сервисная книжка, входящая в комплектацию противоугонной установки.
Пользователь Sigmax69 рассказал о соединении охранного комплекса с цифровым интерфейсом на примере автомобиля Хендай Солярис 2017.
Технические характеристики
От эксплуатационных параметров зависит скорость взаимодействия между элементами системы, а также качество связи между ними. Чаще всего характеристики большинства современных шин имеют следующие значения:
- информация по проводной бортовой сети передается со скоростью примерно 1 Мб/с;
- в процессе обмена данными между отдельными блоками управления показатель скорости снижается до 500 кб/c;
- информация передается в интерфейсах, аналогичных «Комфорт», с невысокой скоростью – близко к 100 кб/с.
Чем новей модель автомобиля, тем прогрессивней в ней стоит разводка. При возможных неполадках придется искать аналоги.
Как передается информация
Итак, CAN-шина представляет собой сеть, по которой происходит обмен информацией между устройствами. Возьмем для примера блок управления двигателем – он имеет не только основной микроконтроллер, но и CAN-устройство, которое формирует и рассылает импульсы по шинам H (CAN-высокий) и L (CAN-низкий), которые называются витая пара.

Сигналы рассылаются по витой паре трансивером или приемопередатчиком. Он нужен для целого ряда задач – усиления сигналов, защиты линии в случае повреждения CAN-шины, создания условий помехозащищенности передаваемых импульсов и регулировки скорости их передачи. В автомобильной промышленности применяются передатчики двух типов с говорящими названиями High Speed и Fault Tolerant. Первый обеспечивает передачу данных на высокой скорости, до 1 мегабита в секунду. Второй не столь быстрый и передает в секунду до 120 килобит в секунду, но при этом допускает отклонение от параметров CAN-шины и не столь чувствителен к ее качеству.

Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN.
Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов.
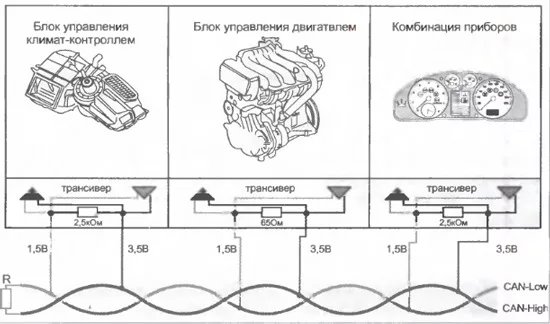
Рис. 2. Фрагмент CAN-шины с распределением нагрузки в проводах: CAN High CAN Low
Системы и блоки управления автомобиля имеют не только различные нагрузочные сопротивления, но и скорости передачи данных, все это может препятствовать обработке разнотипных сигналов.Для решения данной технической проблемы используется преобразователь для связи между шинами.Такой преобразователь принято называть межсетевым интерфейсом, это устройство в автомобиле чаще всего встроено в конструкцию блока управления, комбинацию приборов, а также может быть выполнено в виде отдельного блока.
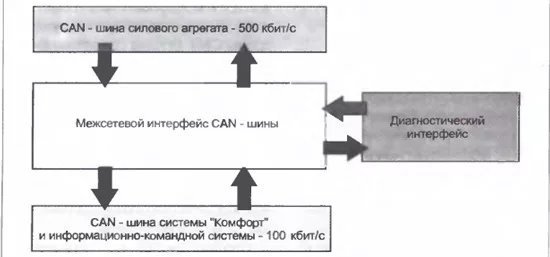
Рис. 3. Блок-схема межсетевого интерфейса
Схема организации обмена данными
Шина данных
p, blockquote 18,0,0,0,0 —>
Структурно схему подключения различных блоков автомобиля к CAN-шине можно изобразить в таком виде:
p, blockquote 19,0,0,0,0 —>
p, blockquote 20,0,0,0,0 —>
Для согласования всех устройств, то есть организации оптимальных условий и скорости приемо — передачи, выходные сопротивления трансмиттеров должны быть приблизительно одинаковы.
p, blockquote 21,0,0,0,0 —>
В случае отключения или повреждения каких-либо из блоков управления систем автомобиля, сопротивление шины изменяется, нарушается согласование по сопротивлению, которое приводит к значительному уменьшению скорости передачи информации по шине. Такие нарушения могут привести к полной потере связи по CAN-шине.
p, blockquote 22,1,0,0,0 —>
На некоторых автомобилях для устранения проблем с синхронизацией CAN-информации применяется отдельный модуль межсетевого интерфейса.
p, blockquote 23,0,0,0,0 —>
p, blockquote 24,0,0,0,0 —>
Каждое сообщение, передаваемое по CAN-шине, имеет собственный идентификатор, например «температура охлаждающей жидкости» и код, соответствующий ее значению, типа «98,7 градусов Цельсия». Не обязательно это будут абсолютные значения, в большинстве случаев это относительные двоичные единицы, которые далее преобразуются в сигналы управления и контроля.
p, blockquote 25,0,0,0,0 —>
p, blockquote 26,0,0,0,0 —>
Эти же данные используют средства диагностики для контроля и обработки информации об основных системах автомобиля.
p, blockquote 27,0,0,0,0 —>
Основные режимы работы CAN-шины:
p, blockquote 28,0,0,0,0 —>
- активный (зажигание включено);
- спящий (при выключенном зажигании);
- пробуждение и засыпание (при включении и выключении зажигания).
Во время спящего режима ток потребления шины минимальный. Однако при этом по шине (с меньшей частотой) передаются сигналы о состоянии открытия дверей и окон, других систем, связанных с охранными функциями автомобиля.
p, blockquote 29,0,0,0,0 —>
В большинстве современных диагностических устройств предусмотрен режим диагностирования ошибок по CAN-шине. Технически это организовано непосредственным подключением проводников к диагностическому разъему.
p, blockquote 30,0,0,0,0 —>
p, blockquote 31,0,0,0,0 —>




