Устройство кан шины, принцип работы и подключение сигнализации
Содержание:
Плюсы и минусы CAN шины
Специалисты по автомобильной электронике, высказываясь в пользу использования CAN-интерфейса, отмечают следующие преимущества:
- простой канал обмена данными;
- скорость передачи информации;
- широкая совместимость с рабочими и диагностическими приборами;
- более простая схема установки автосигнализации;
- многоуровневый мониторинг и контроль интерфейсов;
- автоматическое распределение скорости передачи с приоритетом в пользу основных систем и узлов.
Но есть у CAN-шины и функциональные недостатки:
- при повышенной информационной нагрузке на канал вырастает время отклика, что особенно характерно для работы автомобилей, «напичканных» электронными устройствами;
- из-за использования протокола высшего уровня встречаются проблемы стандартизации.
Преимущества и недостатки применения КАН-шины в автомобиле
Начать следует с того, что, если бы в 80-х годах прошлого века не был предложен стандарт CAN, его место обязательно занял другой вид взаимодействия систем автомобиля.
Можно, конечно, разместить все блоки управления системами автомобиля в едином суперблоке, в котором программно обеспечить взаимодействие разных систем. Такие попытки были у французских производителей. Однако, с увеличением функциональности и производительности значительно увеличивается вероятность отказов. Сбои, например, дворников, могут привести к отказу запуска двигателя.
Основные преимущества применения CAN-шины:
- возможность проведения оперативного контроля и диагностики всех систем автомобиля;
- объединение потоков информации в едином помехозащищенном канале;
- универсальность, способствующая унификации процессов диагностирования;
- возможность подключения охранных систем по CAN-шине (нет необходимости тянуть проводку к каждому элементу контроля).
Недостатки CAN-шины:
- невысокая надежность;
- повреждение одного из блоков управления может привести к полной неработоспособности CAN-соединения.
PT‐CAN, F‐CAN
Для предотвращения отражения сигнала два абонента шины CAN (с максимальным удалением в сети PT-CAN) нагружаются сопротивлением 120 Ом. Оба нагрузочных сопротивления включаются параллельно и образуют эквивалентное сопротивление 60 Ом. При отключенном напряжении питания это эквивалентное сопротивление можно измерить между линиями передачи данных. Кроме этого, можно по отдельности измерить отдельные сопротивления.
Указания по измерению с сопротивлением 60 Ом: Отсоединить от шины легкодоступный ЭБУ. Измерить сопротивление на разъеме между проводами CAN низкого и высокого уровней.
Плюсы и минусы CAN-шин
Преимущества, которыми обладает цифровой интерфейс:
- Быстродействие. Устройство может оперативно обмениваться пакетными данными между разными системами.
- Высокая устойчивость к воздействию электромагнитных помех.
- Все цифровые интерфейсы имеют многоуровневую систему контроля. Благодаря этому можно не допустить появления ошибок при передаче информации и ее приеме.
- При работе шина сама раскидывает скорость по каналам в автоматическом режиме. Благодаря этому обеспечивается эффективная работа электронных систем транспортного средства.
- Цифровой интерфейс является безопасным. Если к электронным узлам и системам автомобиля кто-то попытается получить незаконный доступ, шина автоматически заблокирует эту попытку.
- Наличие цифрового интерфейса позволяет упрощенно произвести монтаж охранной системы на машину с минимальным вмешательством в штатную бортовую сеть.
Минусы, которыми обладает CAN-шина:
- Некоторые интерфейсы имеют ограничения по объему информации, которая может передаваться. Этот недостаток будет весомым для современного автомобиля, «напичканного» электроникой. При добавлении дополнительных устройств на шину возлагается более высокая нагрузка. Из-за этого снижается время отклика.
- Все пакетные данные, которые передаются по шине, имеют определенное назначение. Для полезной информации отводится минимальная часть трафика.
- Если применяется протокол повышенного уровня, это станет причиной отсутствия стандартизации.
Description
Driver API for CAN Bus Peripheral (Driver_CAN.h)
The Controller Area Network Interface Bus (CAN) implements a multi-master serial bus for connecting microcontrollers and devices, also known as nodes, to communicate with each other in applications without a host computer. CAN is a message-based protocol, designed originally for automotive applications, but meanwhile used also in many other surroundings. The complexity of the node can range from a simple I/O device up to an embedded computer with a CAN interface and sophisticated software. The node may also be a gateway allowing a standard computer to communicate over a USB or Ethernet port to the devices on a CAN network. Devices are connected to the bus through a host processor, a CAN controller, and a CAN transceiver.
The CAN Driver API allows to implement CAN Interfaces that conform to the CAN specifications available from BOSCH:
- CAN 2.0B: CAN Specification 2.0B (released Sep. 1991) which is now superseded by ISO 11898-1.
- CAN FD: CAN with Flexible Data Rate introduced in 2012 (released April 17th, 2012).
Wikipedia offers more information about the CAN Bus.
CAN 2.0B** Every CAN CMSIS-Driver supports the CAN 2.0B standard
CAN 2.0B supports:
- message can contain up to 8 data bytes
- bitrates of up to 1Mbits/s
- requests
CAN FD
Support for CAN FD depends on the hardware. A CMSIS-Driver that supports CAN FD has the capability data field fd_mode = 1, which can be retrieved with the function .
CAN FD supports:
- message can contain up to 64 data bytes
- faster data transfers with faster bitrate used during the data phase
CAN FD does not support requests.
Block Diagram
The CAN Driver API defines a CAN interface for middleware components. The CAN Driver supports multiple nodes, which are able to send and receive messages, but not simultaneously.
CAN Node Schematic
Система передачи данных по шине CAN
Логические состояния шин и шифрование
Для обмена данными шина CAN использует два состояния «доминантное» и «рецессивное», с помощью которых передаются информационные биты. Доминантное состояние соответствует «0», а рецессивное — «1». Для шифрования передачи используется процесс NRZ (без возврата на ноль), в котором нулевое состояние не всегда возвращается в промежуток между двумя одинаковыми состояниями передачи и, соответственно, необходимый для синхронизации временной интервал между двумя фронтами может оказаться слишком большим.
В основном используется двухпроводной кабель, в зависимости от окружающих условий, с витой или не витой парой. Две шинные линии называются CAN-H и CAN-L (рис. «Уровень напряжения передачи по CAN» ).
Двухпроводный кабель обеспечивает симметричную передачу данных, при которой биты передаются через обе шинные линии с использованием разных напряжений. Это уменьшает чувствительность к синфазным помехам, поскольку помехи влияют на обе линии и могут быть отфильтрованы путем создания разности (рис. «Фильтрация помех по шине CAN» ).
Однопроводный кабель представляет собой способ сокращения производственных затрат за счет экономии на втором кабеле. Однако общее подключение к массе, выполняющей функцию второго кабеля, должно быть доступно для этой цели всем пользователям шины. Поэтому однопроводный вариант шины CAN возможен только для системы связи с ограниченным монтажным пространством. Передача данных по однопроводному кабелю более чувствительна к излучаемым помехам — он не позволяет фильтровать импульсы помех так, как в двухпроводном кабеле. В результате на шинной линии требуется сигнал более высокого уровня. Это, в свою очередь, отрицательно сказывается на излучении помех. Поэтому необходимо снизить крутизну фронта импульсов сигналов шины по сравнению с двухпроводным кабелем. Это связано с уменьшением скорости передачи данных. По этой причине однопроводной кабель используется только для низкоскоростной шины CAN в области кузова и электроники для функций комфорта. Например, низкоскоростная шина CAN с двухпроводным кабелем в случае обрыва кабеля должна продолжать работать как однопроводная система. Однопроводное решение не описывается в спецификации CAN.
Уровни напряжения шины CAN
Высокоскоростные и низкоскоростные шины CAN используют разные уровни напряжения для передачи доминантных и рецессивных состояний. Уровни напряжения низкоскоростной шины CAN показаны на рис. а, «Уровень напряжения передачи по CAN», а высокоскоростной — на рис. Ь, «Уровень напряжения передачи по CAN».
Высокоскоростная шина CAN в рецессивном состоянии на обеих линиях использует номинальное напряжение 2,5 В. В доминантном состоянии на CAN-H и CAN-L подается номинальное напряжение 3,5 В и 1,5 В, соответственно. В низкоскоростной шине CAN в рецессивном состоянии на CAN-H подается напряжение 0 В (максимум 0,3 В), на CAN-L — 5 В (минимум 4,7 В). В доминантном состоянии на CAN-H напряжение составляет не менее 3,6 В, а на CAN-L не более 1,4 В.
Предельные значения
Для арбитражного метода в случае CAN важно, чтобы все узлы в сети видели биты идентификатора фрейма одновременно, чтобы узел, передавая бит, видел, передают ли их другие узлы. Задержки возникают из-за распространения сигнала в шине данных и обработки в трансивере
Таким образом, максимально допустимая скорость передачи данных зависит от общей длины шины. Стандарт ISO предусматривает скорость 1 Мбит/с для 40 м. У более длинных проводов возможная скорость передачи данных примерно обратно пропорциональна длине провода. Сети с дальностью 1 км могут работать со скоростью 40 кбит/с.
Арбитраж и сигналы на шине CAN
CAN – это протокол CSMA/CD, означающий, что каждый узел на шине может обнаруживать коллизии и откатываться на определенное время перед попыткой повторной передачи. Это обнаружение коллизий достигается посредством арбитража приоритетов на основе идентификаторов сообщений. Прежде чем обсудить арбитраж, давайте подробнее рассмотрим доминантные и рецессивные биты, используемые на шине CAN.
Интересным аспектом шины CAN является то, что она использует инвертированную форму логики с двумя состояниями: доминантным и рецессивным. На рисунке ниже показана упрощенная версия вывода и ввода CAN-трансивера. Поток битов ‘101’ поступает с / идет на CAN-контроллер и / или микроконтроллер
Обратите внимание, что когда контроллер отправляет поток битов, они дополняются и помещаются в линию CANH. Линия CANL всегда является дополнением CANH
Чтобы арбитраж работал, устройство CAN должно отслеживать как то, что оно отправляет, так и то, что в данный момент находится на шине, то есть то, что оно получает.
На следующем рисунке показаны сигналы CANH и CANL одновременно, так что вы можете видеть шину CAN в действии. Под сигналами шины изображено дифференциальное напряжение, которое соответствует доминантному и рецессивному состояниям сигналов CAN. Первые три сегмента во времени, t1 – t3, нарисованы так, чтобы соответствовать трем битам, показанным на предыдущем рисунке. Мы рассмотрим это с точки зрения драйвера вывода. Ввод драйвера изначально видит «1» и дополняет его до нуля, который помещается в CANH. CANL видит дополнение CANH и переводится в высокое логическое состояние. Это показано как t1 на рисунке
Обратите внимание, что напряжения CANH и CANL смещены относительно друг друга. В течение времени t1 дифференциал CANH — CANL очень близок к нулю, так как CANH и CANL имеют почти одинаковое напряжение
Этот период, когда драйвер посылает логику «1», в результате чего CANH и CANL близки к одному и тому же напряжению, мы называем рецессивным состоянием CAN.
Следующий отправленный бит – «0». CANH получает свое дополнение, и CANL снова получает дополнение CANH
Обратите внимание, что на этот раз напряжения CANH и CANL не близки друг к другу. Следовательно, дифференциальное напряжение (VDIFF) больше
Это CAN-доминантное состояние. Мы говорим, что логика инвертирована, потому что «1» приводит к понижению логического уровня шины, а «0» — к повышению. Входной приемник работает аналогично.
Как упоминалось ранее, чем меньше 11-битный идентификатор, тем выше приоритет сообщения. Каждый бит, который передает узел, он контролирует. Таким образом, узел обнаруживает, что сообщение с более высоким приоритетом размещается на шине. В тот момент, когда узел отправляет рецессивный бит, но обнаруживает доминантный бит на шине, он «отступает». Это называется неразрушающим арбитражем, потому что «победившее» сообщение продолжает передаваться без каких-либо проблем
Обратите внимание, что рецессивная логика «1» проигрывает доминантной логике «0». Это имеет смысл, поскольку более низкое значение идентификатора представляет более высокий приоритет
Чтобы лучше понять, что это значит, взгляните на следующий рисунок, на котором показаны три узла на шине CAN, пытающиеся получить контроль
Важно помнить, что каждый раз, когда отображается рецессивный бит, контроллер отправляет «1», в то время как доминантные биты соответствуют отправке «0»
Узлы 1–3 все посылают поток битов. Этот поток битов представляет идентификаторы сообщений и их приоритет. Для начала все три узла отправляют «1», который представлен на шине CAN как рецессивный бит. Затем каждый узел отправляет «0» или доминанатный бит. Третий бит, помещенный в шину – это еще один бит «1» или рецессивный бит. На этом этапе ни один из узлов не обнаружил никакого конфликта с другим узлом на шине, поэтому они продолжают передавать.
Для четвертого бита узел 1 отправляет «0» или доминантный бит. Узел 2 передает рецессивный бит, но обнаруживает доминантный бит на шине. Он немедленно «отступает», зная, что в данный момент отправляется сообщение с более высоким приоритетом. Узел 3 продолжает передачу, поскольку он считывает тот же доминантный бит, который он передал. Когда пятый бит помещается в шину, узел 3 затем распознает, что он имеет более низкий приоритет, и прекращает передачу. И узел 2, и узел 3 ждут определенное количество времени, прежде чем пытаться снова. Это показано в правой части рисунка, где выиграл арбитраж узел 3. Как видите, логический бит «0», соответствующий младшему идентификатору сообщения, позволяет проводить арбитраж.
Физическое соединение CAN
Скорости передачи данных (до 1 Мбит / с) требуют достаточно крутого наклона импульса, который может быть реализован только с использованием силовых элементов. В принципе возможно несколько физических соединений. Тем не менее, пользователи и производители группы «CAN in Automation» рекомендуют использовать схемы драйверов в соответствии с ISO 11898.
Встроенные микросхемы драйверов в соответствии с ISO 11898 доступны от нескольких компаний (Bosch, Philips, Siliconix и Texas Instruments). Международная группа пользователей и производителей (CiA) также определяет несколько механических соединений (кабель и разъемы).
6. Physical CAN Connection according to ISO 11898
Error Control
Error Checking and Fault Confinement
This is one of the attributes of CAN that makes it robust. CAN protocol has five methods of error checking, out of which three are at message level while other two are at bit level. Every frame is simultaneously accepted or rejected by every node in the network. If a node detects an error it transmits an error flag to every node and destroys the transmitted frame and the transmitting node resends the frame
Message level
CRC check
In this stage a 15-bit cyclic redundancy check value is calculated by transmitting node and is transmitted in the CRC field. This value is received by all nodes. Then all the nodes calculate CRC value and matches the results with the transmitted value. If values differ than an Error Frame is generated. Since one of the nodes did not receive the message properly it is resent.
ACK slots
When transmitting node sends a message, a recessive bit is sent in acknowledgement slot. After message is received acknowledge slot is replaced by dominant bit which would acknowledge that at least one node correctly received the message. If this bit is recessive, then none of the node has received the message properly.
Form Error
End of frame, Inter-frame space, Acknowledge Delimiter are fields that are always recessive, if any node detects dominant bit in one of these fields than CAN protocol calls it a violation and a Form Frame is generated and original message is resent after certain period.
Bit level
Stuff error
Bit stuffing – It is a very common technique used in telecommunication and data transmission to insert non -informative bits to have same bit rates or to fill the frames .These extra bits are removed by data link layer to retrieve the original message. This same technique is used in bit error.CAN bus is never idle because it uses NRZ method. After five consecutive bits of the same value, a bit with a complement or opposite value is stuffed into the bit stream. If six bits of the same value are detected between SOF and CRC delimiter, error frame is generated. Upon detection of errors, the transmission is aborted and frame is repeated. If errors continue, then the station or node may switch itself off to prevent the bus from being tied up.
Bit error
A node that is sending the bit always monitors the bus. If the bit sent by transmitter differs from the bit value on the bus then error frame is generated. But there is an exception in case of arbitration field or Acknowledge slot where a recessive bit is sent and a dominant bit is received. Then no Bit Error is occurs when dominant bit is monitored.
Conclusion
CAN protocol initially developed for in-vehicle networking of automobiles has expanded its applications in various other industries. The application started for luxurious cars is now being used in heavy duty vehicles like trucks, buses, trains and rail vehicles. The unique feature of CAN that allows various electronic units to communicate with each other made it important in healthcare domain. For example intensive care units and operating rooms where time and communication is of utmost importance. Entertainment industry also used CAN protocols to improve features in studios to control lights and door system and to control stage of theatres, event halls etc. Gambling machines and toys are other examples in entertainment field. In the field of science the high energy experiments and astronomical telescope use CAN in embedded network.
Filed Under: Featured Contributions, Recent Articles
Обзор возможностей протокола CAN
- Продукты — микросхема, инструменты разработки, модули, инструменты проектирования;
- Распределение посланий — каждый участник будет иметь возможность выбирать к просмотру сообщения, касающиеся только его. Для этого предусмотрены фильтры;
- Широковещательный характер – если участник не выбрал только свои сообщения, то он имеет возможность просмотра всего потока информации;
- Контентная адресация – нет явного адресата. Выбираются адреса контента по идентификатору в самом сообщении;
- Виды сообщений – кадр данных, удаленный, ошибки, перезагрузки;
- Стандартный CAN и его расширенная версия – отличаются длиной установленного идентификатора. Если в станд. варианте он равен 11битам, то в его «толстом» собрате – 29 бит;
- Конфликтное разрешение и определение приоритета – чтобы избежать одновременной передачи данных несколькими участниками, выработан арбитражный механизм. Все пакеты поделены на доминантный и рецессивный. Не вдаваясь в подробности, отметим только, что всегда приоритет на стороне доминантного сообщения.
- Физические уровни:
— сигнальная сбалансированная двухпроводная схема high–speed CAN представляет вторую часть стандарта ISO 11898;
— третья часть ISO 11898 составляет следующий уровень вышеназванной схемы;
— однопроводной уровень, описываемый стандартом SAE J2411. Шины этого уровня установлены, например, на автомобилях линейки Дженерал Моторс.
- Прерывание конца – CAN-шина должна содержать на конце резисторное сопротивление (120ОМ), для гашения отражения сигнала, создания уровня постоянного тока.
- Кабель – сопротивление должно укладываться в интервал 108 – 132ОМ.
- Разъем – нет стандартов для разъемов CAN. Каждый протокол описывает свои предпочтения. Однако есть фактический стандарт для автопромышленности.
- Ошибка – контролер найдет ее и отметит флажком, разрушая передачу. Эти флажки станут знаком для всех участников цепи на ее сброс.
- Сбои в передачи – при различных сбоях дается возможность дальнейшего функционирования. Сбои могут быть разного характера: прерывание, короткое замыкание в разных частях, разъединение с оконечным сопротивлением.
Introduction
CAN is a two-wire, half duplex, high-speed network system, that is far superior to conventional serial technologies such as RS232 in regards to functionality and reliability and yet CAN implementations are more cost effective.
While, for instance, TCP/IP is designed for the transport of large data amounts, CAN is designed for real-time requirements and with its 1 MBit/sec baud rate can easily beat a 100 MBit/sec TCP/IP connection when it comes to short reaction times, timely error detection, quick error recovery and error repair.
CAN networks can be used as an embedded communication system for microcontrollers as well as an open communication system for intelligent devices. Some users, for example in the field of medical engineering, opted for CAN because they have to meet particularly stringent safety requirements.
Similar requirements had to be considered by manufacturers of other equipment with very high safety or reliability requirements (e.g. robots, lifts and transportation systems).
The greatest advantage of Controller Area Network lies in the reduced amount of wiring combined with an ingenious prevention of message collision (meaning no data will be lost during message transmission).
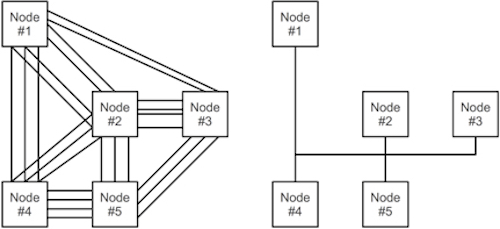
Without CAN — With CAN
The following shows a need-to-know overview of CAN’s technical characteristics.
Controller Area Network
- Is a serial networking technology for embedded solutions.
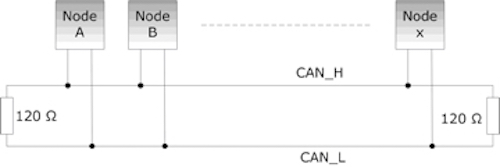
- Needs only two wires named CAN_H and CAN_L.
- Operates at data rates of up to 1 Megabit per second.
- Supports a maximum of 8 bytes per message frame.
- Does not support node IDs, only message IDs. One application can support multiple message IDs.
- Supports message priority, i.e. the lower the message ID the higher its priority.
- Supports two message ID lengths, 11-bit (standard) and 29-bit (extended).
- Does not experience message collisions (as they can occur under other serial technologies).
- Is not demanding in terms of cable requirements. Twisted-pair wiring is sufficient.
Сетевая гибкость и лёгкость расширения
Принятая в CAN-сети схема передачи сообщений обеспечивает большие возможности при создании, расширении и модернизации систем.
Новые устройства, предназначенные для приёма данных, могут добавляться к сети без изменения уже существующих программных средств, если их подключение не приводит к превышению нагрузочной способности и максимальной длины шины. При этом новые сетевые устройства способны обмениваться информацией между собой, не нарушая работоспособность старой системы, если в протоколе обмена были использованы новые идентификаторы.
В CAN-сети имеется возможность одновременной передачи сообщений сразу нескольким устройствам. Эта особенность позволяет передавать по ней синхросигналы.
CAN-шина: немного теории и практика
Уже сегодня CAN интерфейс уверенно вытесняет UART-производные интерфейсы (rs485, rs232) как более функциональная шина с большей производительностью, и на это есть причины. Но до сих пор не так много разработчиков знает как и с чем «есть» этот интерфейс. Попытаемся рассмотреть немного примеров и поделиться собственным опытом использования этого интерфейса, а также общую теорию, примеры применения и практические рекомендации по использованию.
Что же такое CAN-bus, в общих словах это подобный ethernet интерфейс, описывающий логику работы шины, при этом не привязан ни к какому физическому уровню, ну и конечно ни к какому протоколу. Интерфейс очень продуман, он исключает коллизии, ошибки на линии и гарантирует доставку, при этом в нем нет архитектуры master-slave, тут каждое устройство просто «выкидывает» на линию данные и все устройства могут просматривать полученные данные, как-будто все master’ы. Скорость на кан-шине — до 1 Мбит. Да да, такое даже и не снилось rs485, на смену которого пришел CAN.
При таких плюсах есть и свои недостатки. Устройств с интерфейсом UART очень много, а вот с поддержкой CAN bus очень мало. В то же время тормозящим фактором для новой шины является сама сложность программной реализации низкого уровня (драйвера), не каждый программист готов взяться за освоение новой тематики. UART конечно есть везде и даже на самом простом процессоре, это один из самых старых интерфейсов, соответственно даже самый ленивый программист хоть раз сталкивался с таким интерфейсом.
Если же процессор не имеет на борту CAN-контроллера, это не так страшно. Многие используют микросхемы типа mcp2510, это контроллер, подключаемый по SPI. Его используют многие производители электроники, embedded linux имеет даже поддержку этого чипа в некоторых BSP, так что подключить кан-контроллер к устройство с маленьким линуксом может не составить труда.
Теперь немного о физической реализации. Есть стереотип, что CAN связан с физической реализацией. Это не так. Но тем не менее чаще всего используется витая пара для передачи сигнала, уровень сигнала в витой паре чуть больше 3 вольт. Сигнал хорошо видно на осциллографе, при правильном подключении это набор прямоугольных импульсов. Есть так же оптическая реализация физической линии, по сути сигналы в ней ничем не отличаются.
Если мы говорим про реализацию витой парой, то стоит знать еще несколько вещей. На концах шины стоят развязывающие сопротивления, их значения 120 Ом. Практика показывает, что возможно использование и резисторов номиналом около 500 Ом. Применение этих резисторов связано с распространением сигнальных волн высокой частоты. Также есть мнение, что стоит использовать кабель не менее 1 метра для связи двух устройств, хотя все конечно зависит от навыков схемтохника и понимания того, что происходит на шине.
CAN Interface Hardware
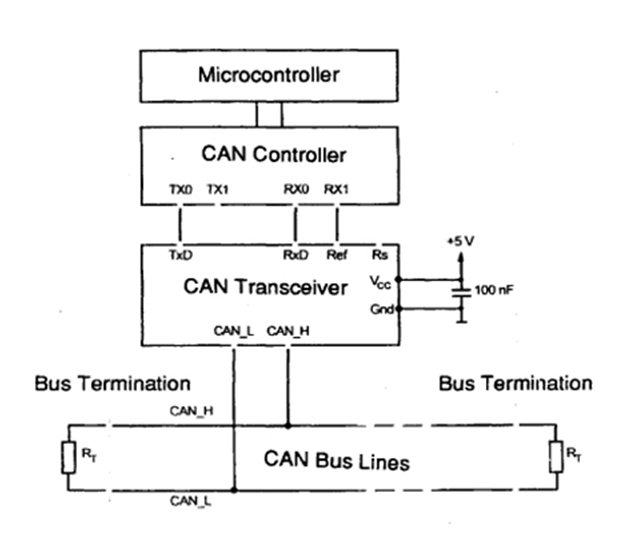
A great variety of microprocessor chips, such as the ARM Cortex-M3 processor, provide interfaces such as Ethernet, digital I/O, analog I/O, USB, UARTS, and, last but not least, Controller Area Network. However, that does not mean that you can use the chip “as is” and connect it to a network, sensors, etc. All of these interfaces require some kind of a “hardware driver.” In case of serial technologies such as RS232 or CAN, you will need the corresponding transceiver.
In the specific case of the CAN bus controller, we need a line driver (transceiver) to convert the controller’s TTL signal to the actual CAN level, which is a differential voltage. The use of differential voltage contributes to the vast reliability of CAN.
![]()
The next image compares both signals, TTL and differential voltage:
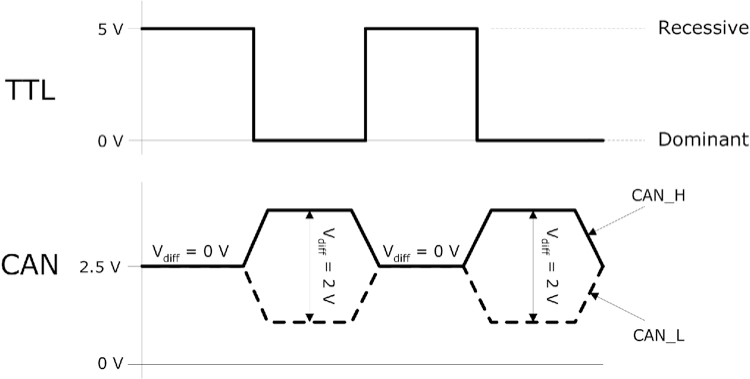
The actual signal status, recessive or dominant, is based on the differential voltage between CAN_H and CAN_L (2V during dominant bit time; 0V during recessive bit time).
Передача данных по Кан-шине
Сигналы с электронных приборов, параллельно соединенных в цепь Кан-шины, по двум сплетенным проводам (витой паре), поступает на полосы шины. При этом, на каждом проводе будет свое напряжение, отличное от напряжения во втором проводе.
Другие участники считывают эту информацию. Путем проставления фильтров и идентификаторов, зашифрованных в самом послании, определяется адресат сообщения.
Тот, получив наказ на какое-либо действие, спешит его выполнить.
В покое, напряжение в проводах витой пары одинаковое и составляет 2,5В. Это, так называемое, рецессивное положение. Во время начала сеанса, провода приводятся в возбуждение участником, посылающим сообщение. Напряжение на одном из проводов (CAN High) начинает возрастать, достигая 3,5В. На другом (CAN low) – убывать, до достижения отметки 1В.
Каждое звено общей цепи подключается к CAN кабелю посредством трансивера, в котором разность двух напряжений преобразуется в одно, выходное (2В). Его и получают участники процесса. Таким образом, исключается влияние на обмен информации, непостоянство напряжения электрической сети автомобиля.
Инструкция по подключению сигнализации по CAN-шине
При монтаже противоугонной системы простой вариант ее соединения с бортовой сетью — связать охранную установку с цифровым интерфейсом. Но такой метод возможен при наличии КАН-шины в автомобиле.
Чтобы произвести установку автосигнализации и подключить ее к CAN-интерфейсу, необходимо знать место монтажа блока управления системой.
Если сигналку ставили специалисты, то надо обратиться за помощью с этим вопросом на СТО. Обычно устройство располагается за приборной панелью автомобиля или под ней. Иногда установщики ставят микропроцессорный модуль в свободное пространство за бардачком или автомагнитолой.
Пошаговые действия
Процедура подключения противоугонной установки к CAN-шине осуществляется так:
- Сначала надо убедиться, что все элементы охранного комплекса установлены и работают. Речь идет о микропроцессорном блоке, антенном модуле, сервисной кнопке, сирене, а также концевых переключателях. Если сигнализация имеет опцию автозапуска, надо убедиться в правильности монтажа этого устройства. Все элементы противоугонной установки подключаются к микропроцессорному блоку.
- Выполняется поиск основного проводника, идущего к CAN-шине. Он более толстый и его изоляция обычно окрашена в оранжевый цвет.
- Основной блок автосигнализации соединяется с данным контактом. Для выполнения задачи используется разъем цифрового интерфейса.
- Производится монтаж блока управления охранной системы, если он не был установлен. Его следует разместить в сухом и недоступном для посторонних глаз месте. После монтажа устройство надо качественно зафиксировать, иначе в процессе движения на него будут оказывать негативное воздействие вибрации. В результате это приведет к быстрой поломке модуля.
- Место соединения проводников тщательно изолируется, допускается использование термоусадочных трубок. Рекомендуется дополнительно обмотать изолентой провода. Это позволит увеличить их ресурс эксплуатации и не допустить стирания изоляционного слоя. Когда подключение будет выполнено, осуществляется проверка. Если возникли проблемы в передачи пакетных данных, с помощью мультиметра следует произвести диагностику целостности электроцепей.
- На завершающем этапе выполняется настройка всех каналов связи, в том числе дополнительных, если они имеются. Это позволит обеспечить бесперебойную работу охранной системы. Для настройки используется сервисная книжка, входящая в комплектацию противоугонной установки.
Пользователь Sigmax69 рассказал о соединении охранного комплекса с цифровым интерфейсом на примере автомобиля Хендай Солярис 2017.
Физические составляющие
Устройство шины состоит, помимо кабеля, из нескольких элементов.
Микросхемы приемопередатчика часто встречаются от компании Philips, а также Siliconix, Bosch, Infineon.
Чтобы понять, что такое КАН-шина, следует изучить ее компоненты. Максимальная длина проводника при скорости 1 Мбит/с достигает 40 м. Шина- CAN (известная еще как CAN-BUS) в конце наделена терминатором.
Для этого на конец проводников устанавливаются резисторы сопротивления по 120 Ом. Это необходимо, дабы устранить отражения сообщения на конце шины и убедиться, что она получает соответствующие уровни тока.
Сам проводник в зависимости от конструкции может быть экранированным или неэкранированным. Концевое сопротивление может отходить от классического и находиться в диапазоне от 108 до 132 Ом.
Что такое CAN-шина и принцип ее работы
КАН-шина представляет собой сеть контроллеров. Устройство используется для объединения всех управляющих модулей автомобиля в одну рабочую сеть с общим проводом. Этот девайс состоит из одной пары кабелей, которая называется CAN. Информация, передающаяся по каналам из одного модуля на другой, отправляется в закодированном виде.
Схема подключения устройств к CAN-шине в Мерседесе
Какие функции может выполнять CAN-шина:
- подключение к автомобильной бортовой сети любых девайсов и устройств;
- упрощение алгоритма подсоединения и функционирования вспомогательных систем машины;
- блок может одновременно получать и передавать цифровые данные из разных источников;
- использование шины снижает воздействие внешних электромагнитных полей на функционирование основных и вспомогательных систем машины;
- CAN-шина позволяет ускорить процедуру передачи информации к определенным устройствам и узлам автомобиля.
Эта система работает в нескольких режимах:
- Фоновый. Все устройства отключены, но на шину подается питание. Величина напряжения слишком мала, поэтому разрядить аккумуляторную батарею шина не сможет.
- Режим запуска. Когда автолюбитель вставляет ключ в замок и проворачивает его либо жмет кнопку Старта, происходит активация устройства. Включается опция стабилизации питания, которое подается на контроллеры и датчики.
- Активный режим. В этом случае между всеми контроллерами и датчиками происходит обмен данными. При работе в активном режиме параметр потребления энергии может быть увеличен до 85 мА.
- Режим засыпания или отключения. При глушении силового агрегата контроллеры КАН перестают функционировать. При включении режима засыпания все узлы машины отключаются от бортовой сети.
Канал Виалон СУшка в своем видео рассказал о КАН-шине и что надо знать про ее эксплуатацию.
Плюсы и минусы
Какими преимуществами обладает КАН-шина:
- Простота установки устройства в автомобиль. Владельцу машины не придется тратиться на монтаж, поскольку выполнить эту задачу можно самостоятельно.
- Быстродействие устройства. Девайс позволяет быстро обмениваться информацией между системами.
- Устойчивость к воздействию помех.
- Все шины обладают многоуровневой системой контроля. Ее использование дает возможность предотвратить появление ошибок при передаче и приеме данных.
- В процессе функционирования шина автоматически разбрасывает скорость по разным каналам. Это позволяет обеспечить оптимальную работу всех систем.
- Высокая безопасность устройства, при надобности система блокирует несанкционированный доступ.
- Большой выбор устройств различных типов от разных производителей. Можно подобрать вариант, предназначенный для конкретной модели авто.
Какие недостатки характерны для устройства:
- В девайсах бывают ограничения по объему передаваемых данных. В современных автомобилях используется множество электронных девайсов. Их большое количество приводит к высокой загруженности канала передачи информации. Это становится причиной увеличения времени отклика.
- Большая часть отправляющихся по шине данных обладает конкретным назначением. На полезную информацию отводится маленькая часть трафика.
- При использовании протокола высшего уровня автовладелец может столкнуться с проблемой отсутствия стандартизации.




